msrDynamics
Documentation Under Construction
msrDynamics is an object-oriented API for constructing and solving reduced order thermal hydraulic systems, written
with emulation of Simulink-style solvers for molten salt reactor (MSR) systems in mind
(e.g. Singh et al), but can be extended to
other fission and/or thermal hydraulic systems. The goal of this package is to streamline the implementation of such
nodal models for more complex systems, where direct handling of the equations can become cumbersome.
Theory & Background
The API is designed for building nodal systems where variables representing system components or masses are aggregated into nodes with associated properties, and which only interact with other nodes through these properties. The nodes therefore, are essentially representations of the state variables of a first-order system of differential equations, suitable for a numerical solver.
A first-order system of ODEs (ordinary differential equations) takes the form
For MSRs and other thermal hydraulic systems, the dynamics of the state at a given time, \(\dot{y(t)}\), depend on the state at time \(t\), \(y(t)\), but may also depend on the state at some previous time \(y(t-\tau)\) where \(\tau = (\tau_1, \tau_2, ...)\) are the respective delay times of the relevant state variables. The system to be solved is therefore a delay differential equation of the form
msrDynamics essentially provides tools to construct symbolic expressions representing a system of this form, which
are then passed to JiTCDDE as the backend solver. JiTCDDE integrates
adaptively using a Bogacki-Shampine pair. The state and derivative of the system or stored at each integration step,
which allows for past states to be evaluated using piece-wise cubic hermite interpolation. This is the DDE integration
method proposed by Shampine and Thompson [ST01].
Modeling Approach
The model essentially describes heat flow through the component masses, aggregating all spatial considerations into zero-dimensional (spatial) relationships governed by constant coefficients. Listed below is some relevant literature on this approach and its applications:
The figure below shows an MSR core, modeled after that of the Aircraft Reactor Experiment (ARE). Each node is represented by its mass and thermophysical properties.
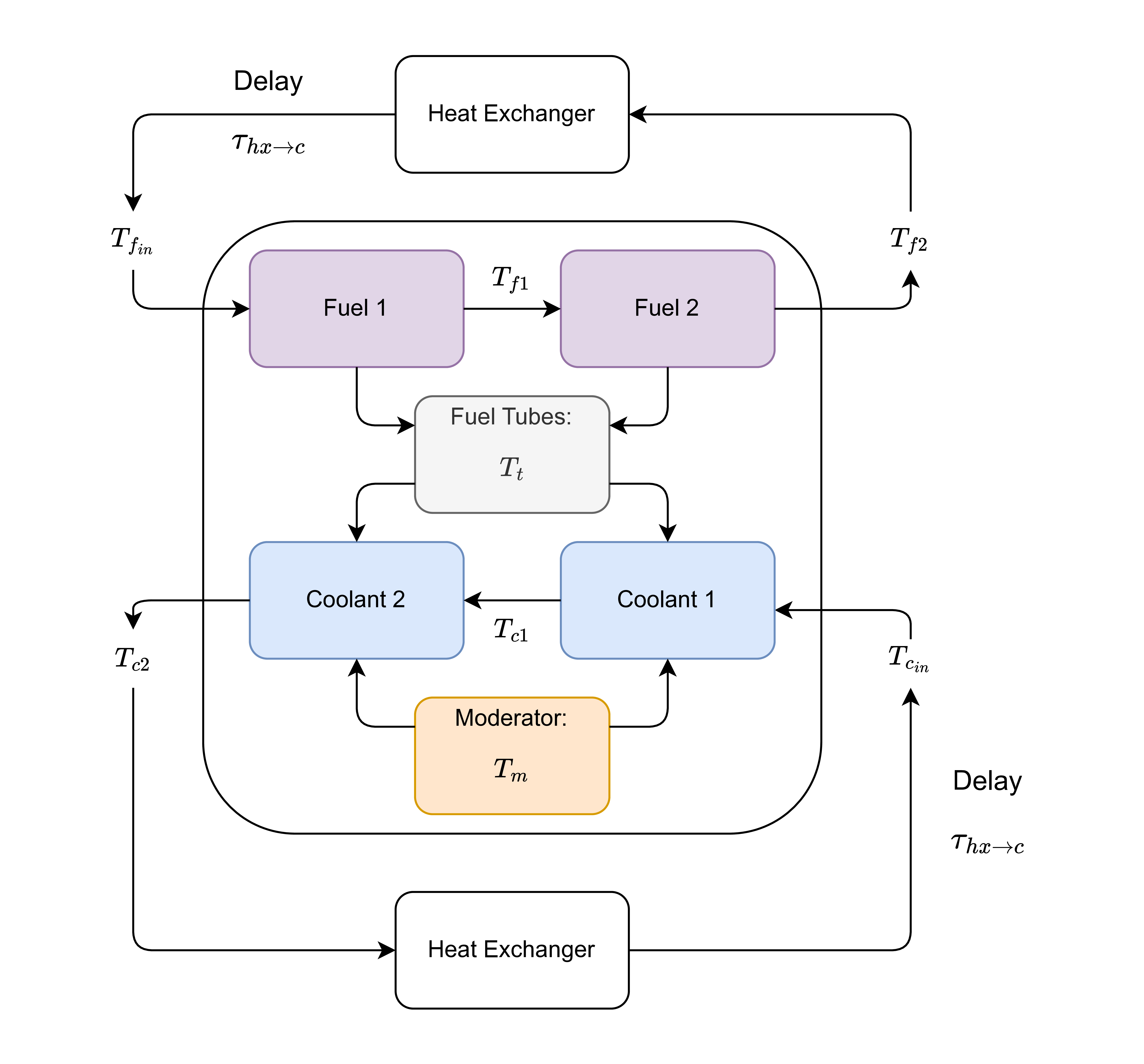
The ARE core consisted of NaF-ZrF4-UF4 fuel which flowed through inconel tubes making several passes through BeO moderator blocks. A liquid sodium coolant flowed in the opposite direction, in direct contact with the moderator blocks and fuel tubes. The arrows in the figure above represent the heat flows considered in the model. For example, there is advective heat flow between Fuel 1 and Fuel 2. Both are in contact with the tubes. As such there is convective heat exchange between the fuel and the fuel tubes.
Usage & API Description
The Node() object includes helper functions to define symbolic expressions representing convective and advective heat
transfer, as well as generation from point-kinetics. User-defined dynamics are supported as well. The ARE core (shown above) can be modelled as follows
from msrDynamics import Node, System
# instantiate system object
ARE = System()
# mass, kg
m_fuel_core = 100.0
m_coolant_core = 100.0
m_tubes_core = 100.0
m_moderator_core = 350.0
# specific heat capacity MW/°K
scp_fuel = 2.0e-3
scp_coolant = 4.0e-3
scp_moderator = 2.0e-3
scp_tubes = 0.5e-3
# flow rate, kg/s
W_fuel = 100.0
W_coolant = 50.0
# convection heat transfer coefficients, MW/°K
hA_fuel_tubes = 0.1
hA_coolant_tubes = 0.4
# delays
tau_c = 12.0
tau_l = 16.0
# inlet temperatures
T_f_in = 650
T_c_in = 500
# power in MW & fraction of power generated in fuel nodes
P = 2.0
P_f_1 = 0.5*P
P_f_2 = 0.5*P
# neutronics parameters
Lam = 1.32e-04 # mean generation time (openmc ifp branch)
lam = np.array([1.240E-02, 3.05E-02, 1.11E-01, 3.01E-01, 1.140E+00, 3.014E+00]) # precursor decay constants
beta = (np.array([0.000223, 0.001457, 0.001307, 0.002628, 0.000766, 0.00023])) # delayed precursor yield
beta_t = np.sum(beta) # total delayed neutron fraction
# ARE
beta_fracs = beta/beta_t
beta_t = 0.0047 # ORNL-1845 pg. 150
beta = np.array([beta_fracs[i]*beta_t for i in range(len(beta))])
# initial conditions (analytical steady-state solutions)
n_frac0 = 1.0 # initial fractional neutron density n/n0 (n/cm^3/s)
rho_0 = beta_t-sum(np.divide(beta,1+np.divide(1-np.exp(-lam*tau_l),lam*tau_c))) # reactivity change in going from stationary to circulating fuel
C0 = beta / Lam * (1.0 / (lam - (np.exp(-lam * tau_l) - 1.0) / tau_c))
# define nodes
n = Node(y0 = n_frac0)
C1 = Node(y0 = C0[0])
C2 = Node(y0 = C0[1])
C3 = Node(y0 = C0[2])
C4 = Node(y0 = C0[3])
C5 = Node(y0 = C0[4])
C6 = Node(y0 = C0[5])
rho = Node(y0 = rho_0)
fuel_1 = Node(m = m_fuel_core/2, scp = scp_fuel, W = W_fuel)
fuel_2 = Node(m = m_fuel_core/2, scp = scp_fuel, W = W_fuel)
fuel_tubes = Node(m = m_tubes_core, scp = scp_tubes)
coolant_1 = Node(m = m_coolant_core/2, scp = scp_coolant, W = W_coolant)
coolant_2 = Node(m = m_coolant_core/2, scp = scp_coolant, W = W_coolant)
moderator = Node(m = m_moderator_core/2, scp = scp_moderator)
# add nodes to system object
ARE.add_nodes([n, C2, C2, C3, C4, C5, C6, rho, fuel_1, fuel_2, fuel_tubes,
coolant_1, coolant_2, moderator])
# define dynamics
fuel_1.set_dTdt_advective(source = T_f_in)
fuel_1.set_dTdt_convective(source = [fuel_tubes.y()], hA = [hA_fuel_tubes/2.0])
fuel_1.set_dTdt_internal(source = [50.0], k = [P_f_1])
fuel_2.set_dTdt_advective(source = fuel_1.y())
fuel_2.set_dTdt_convective(source = [fuel_tubes.y()], hA = [hA_fuel_tubes/2.0])
fuel_2.set_dTdt_internal(source = [50.0], k = [P_f_2])
fuel_tubes.set_dTdt_convective(
source = [fuel_1.y(), fuel_2.y(), coolant_1.y(), coolant_2.y()],
hA = [hA_fuel_tubes/2.0, hA_fuel_tubes/2.0, hA_coolant_tubes/2.0, hA_coolant_tubes/2.0]
)
coolant_1.set_dTdt_advective(source = T_c_in)
coolant_1.set_dTdt_convective(source = [fuel_tubes.y()], hA = [hA_coolant_tubes/2.0])
coolant_2.set_dTdt_advective(source = coolant_1.y())
coolant_2.set_dTdt_convective(source = [fuel_tubes.y()], hA = [hA_coolant_tubes/2.0])
# define time domain & solve
minutes = 5.0
T = np.arange(0.0, minutes*60.0, 0.01)
sol = ARE.solve(T, populate_nodes = True)
Note, the source argument of set_dTdt_advective() can either be a constant float, or another state variable.
Advanced Features
Inputs
The jitcdde backend supports several representations of input. Users are referred to the
jitcdde documentation for more detail. An example file can be found
here. jitcdde-compatible representations of input
can be given as arguments to the helper functions of msrDynamics.Node
Trip Conditions
The user can impose operating limits on the state variables using msrDynamics.TripCondition. When trip conditions are added to the
system, integration will stop when the condition is reached, and the time at which the condition is reached will be estimated with a cubic
interpolation of the anchor points closest to the trip time.
PID Control
The msrDynamics.PID_loop class allows users to create objects which implement PID control logic compatible with the
jitcdde backend. The object takes the PID control parameters, along with the state variable associated with the
setpoint, and returns a callable function which can be used as an input variable in symbolic expressions, or in the
msrDyanamics.Node helper functions. The PID loop can be used to control the temperature of a node, for example,
by setting the setpoint to the desired temperature, and the state variable to the temperature of the node.
The PID loop will then return the control signal which can be used as an input to the node’s dynamics.
Equilibrium Search
API Reference
- class msrDynamics.Node(name: str = None, m: float = 0.0, scp: float = 0.0, W: float = 0.0, y0: float = 0.0)[source]
Bases:
objectNode class for thermal hydraulic system.
This class represents a node in an MSR system, encapsulating physical properties and dynamics.
- dTdt_advective
Symbolic expression for the rate of temperature change due to advective heat flow in kelvin per second (K/s).
- Type:
- dTdt_internal
Symbolic expression for the rate of temperature change due to internal heat generation in kelvin per second (K/s).
- Type:
- dTdt_convective
Symbolic expression for the rate of temperature change due to convective heat flow in kelvin per second (K/s).
- Type:
- y
JiTCDDE state variable object, to be assigned by the System class.
- Type:
None or callable
- y_out
Solution data, to be populated by the System class.
- Type:
np.ndarray
- set_dTdt_advective(source)[source]
Set the rate of temperature change due to advective heat transfer.
- set_dTdt_internal(source: list, k: list)[source]
Set the rate of temperature change due to internal heat generation.
- Parameters:
source (callable) – Source of generation (state variable y(i)).
k (float) – Constant of proportionality.
- set_dTdt_convective(source: list, hA: list)[source]
Set the rate of temperature change due to convective heat transfer.
- set_dndt(r: y, beta_eff: float, Lambda: float, lam: list, C: list)[source]
Set the rate of change of neutron population using the point kinetics equation.
- set_dcdt(n: y, beta: float, Lambda: float, lam: float, flow: bool = False, t_c: float = 0.0, t_l: float = 0.0, force_steady_state: bool = False, max_delay: float = 10000000000.0)[source]
Set the rate of change of precursor concentration.
- Parameters:
n (y) – Fractional neutron concentration (state variable y(i)).
beta (float) – Fraction for precursor group.
Lambda (float) – Prompt neutron lifetime.
lam (float) – Decay constant for precursor group.
flow (bool) – Indicates if flow is considered in the model.
t_c (float) – Core transit time (seconds).
t_l (float) – Loop transit time (seconds).
- Raises:
ValueError – If flow is True and either t_c or t_l are not set properly.
- class msrDynamics.System(nodes=None, dydt=None, y0=None)[source]
Bases:
objectSystem class for thermal hydraulic system.
This class represents the entire thermal hydraulic system, consisting of multiple nodes.
- inputs
Input spline for the system.
- Type:
None or CubicHermiteSpline
- integrator
JiTCDDE integrator.
- Type:
jitcdde or jitcdde_input
- custom_past
Custom past spline for the integrator.
- Type:
None or CubicHermiteSpline
- property dydt
List of symbolic expressions representing the rate of change for each node.
- Type:
- add_input(input_func, times, max_anchors=100, input_tol=5, name: str = None)[source]
Add an input function of time to the integrator.
- Parameters:
input_func (callable) – Input function.
- Returns:
JiTCDDE input object.
- Return type:
input
- set_custom_past(past: CubicHermiteSpline, t_truncate=None)[source]
Set custom past data for the integrator.
- Parameters:
past (chspy.CubicHermiteSpline) – Custom past data.
t_truncate (float, optional) – Time to truncate the past data. Default is None.
- add_nodes(new_nodes: list)[source]
Add nodes to the system.
- Parameters:
new_nodes (list) – List of nodes to be added.
- solve(T, max_delay=10000000000.0, populate_nodes=False, abs_tol=1e-10, rel_tol=1e-05, min_step=1e-10, max_step=10.0, md_step=0.001)[source]
Solve the system and return the solution matrix.
- Parameters:
t0 (float) – Initial time.
tf (float) – Final time.
incr (float) – Time increment.
sdd (bool) – State-dependent delays.
max_delay (float) – Maximum delay.
max_anchors (int) – Maximum number of anchors.
input_tol (int) – Tolerance for input spline.
populate_nodes (bool) – Populate node objects with solutions.
abs_tol (float) – Absolute tolerance for integration.
rel_tol (float) – Relative tolerance for integration.
- Returns:
Solution matrix.
- Return type:
np.ndarray
- equilibrium_search(dT, max_delay=10000000000.0, populate_nodes=False, abs_tol=1e-10, rel_tol=1e-05, min_step=1e-10, max_step=10.0, md_step=0.001, abs_tol_eq=1e-06, rel_tol_eq=0.0001, max_iter=9223372036854775807, norm=None, show_conv_metrics=False, start_time=0.0)[source]
Solves until equilibrium condition reached
- plot_input(index, fac=1.0)[source]
Plot the input function for the given index.
- Parameters:
index (int) – Index of the input function.
- Returns:
Axes object with the plot of the selected input.
- Return type:
matplotlib.axes.Axes
- evaluate_expr(expr, t_array, y_array)[source]
Evaluate a symbolic expression over time.
Supports SymEngine expressions using current_y(i) by converting them to valid sympy Symbols.
- Parameters:
expr – symengine.Basic or str, the symbolic expression (e.g., from p[‘flows’])
t_array – (n,) array of times
y_array – (n, m) array where y[i, j] = current_y(j) at t[i]
- Returns:
(n,) array of evaluated values
- class msrDynamics.TripCondition(trip_type=None, bounds=(-inf, inf), idx=None, check_after=None, delay=None, name=None)[source]
Bases:
objectClass to store information about trip conditions for state variables.
- class msrDynamics.PID_loop(base_value: float, setpoint_node: Node, setpoint_value: float, k_p: float = 0.0, k_i: float = 0.0, k_d: float = 0.0, name: str = None, n_args: int = 2, initial_value: float = None, bound: tuple = None, clegg_integrator: bool = False, min_reading: float = None, store_all_output: bool = False)[source]
Bases:
objectImplements a PID (Proportional-Integral-Derivative) control loop with options for customization, state tracking, and boundary constraints.
- output_sym
Symbolic representation of the PID output.
- Type:
Function